Takto například můľe vypadat počítač, ze kterého se dají promítat slidy o hodině. Kromě promítání slidů umí například jezdit, při čemľ se pokouąí nehavarovat do překáľek.
Mezi tyto přístroje patří například Raspberry Pi, coľ byl
původně výukový model počítače, na kterém se měli ľáci učit
programovat. Tento přístroj je vąak dostatečně výpočetně
výkonný, aby se na něm dal spustit některý ze systémů UNIXového typu
a lze jej podle toho také pouľívat. Daląím typem představitelů
jsou destičky typu Arduino. I to jsou stroje, které měly slouľit
k výuce programování, kybernetiky a automatizace. A právě na tyto dva
typy představitelů zaměříme svou pozornost. Neľli si o nich ale
začneme povídat, je opět potřeba drobný úhybný manévr.
Přístroje, které jsou předmětem naąeho zájmu, nepracují s napětím vyąąím neľli 5 V (neseľenete-li si USB-nabíječku, jejíľ zem má proti skutečné zemi napětí 48 V, jako se před časem podařilo mně). Při 5V napětí nehrozí elektrický ąok (kdeľto zmíněných 48 V je uľ něco trochu jiného). Jakýkoliv přístroj připojený k elektrické síti je předevąím zdrojem tepelné energie, na coľ je potřeba dát pozor. Neodborně připojené přístroje mohou snadno způsobit poľár.
Po těchto upozorněních jiľ přistoupíme k odborným tématům. Jelikoľ motivací pro práci s Internetem věcí je automatizace, potřebujeme z přístrojů, které umíme ovládat, nějak dostat informaci ven (to je u běľného počítače problematické). Toto se děje pomocí tzv. pinů. Pin pro nás v tuto chvíli nebude číslo ovládající kartu (a» uľ platební nebo telefonní), ale drátek čnící z destičky, ke kterému se očekává připojení nějakého přístroje. Těmito piny právě destičky jsoucí teď v centru naąeho zájmu komunikují se světem. Svět pro ně sestává z přístrojů, kterým pomocí těchto pinů posílají vhodným způsobem proud. Některé piny jsou napájecí, jiné jsou zemnicí, větąina jich vąak tvoří GPIO, tedy General Purpose Input/Output. Jde tedy o drátky, které mohou reprezentovat vstup nebo výstup. Vstup či výstup můľe být buďto analogový, kdy v jednotlivých krocích (řekněme 1 024) zvyąujeme napětí od nuly po stanovenou mez (v případě TTL 3.3 V). Vstup či výstup můľe být téľ digitální, coľ znamená, ľe přijmeme hodnotu 0 (odpovídající nejvýąe několika stům milivoltům) nebo 1 (odpovídající alespoň stovkám milivoltů). Naąe přístroje tedy budou komunikovat tak, ľe buďto z jednotlivých pinů čtou údaje, nebo na ně údaje zapisují. Tyto údaje si pak přečte někdo daląí (kdo je k tomu pinu připojený), případně nám je někdo (opět připojený) po tom pinu posílá.
Aby ve věcech nebyl náhodou pořádek, obvykle existuje více druhů číslování pinů (alespoň dva). Jeden odkazuje k číslování výrobce čipů (v pořadí, ve kterém piny lezou ven), druhý (přibliľně stejně častý) systém se opírá o polohu na finální destičce (na kterou jsou piny vyvedeny). Tato číslování spolu obvykle mají jen velmi málo společného a je tudíľ potřeba dát pozor, o jaké číslování se jedná!
Python je programovací jazyk připomínající Járu Cimrmana. Ten prý vypadal jako sopka, která postupem času zavalila samu sebe. Python je na tom úplně stejně. Jeho hlavní výhodou je, ľe má wrappery kolem mnoľství knihoven, takľe nechceme-li seriosně programovat, ale jen lepit kusy kódu k sobě, je přesně tím, co hledáme. Nevýhody jsou vąe ostatní. Jako kaľdý interpretovaný jazyk je pomalý (asi 100x pomalejąí neľli C#) a mezi programovacími jazyky patří k těm podivnějąím. Stručně řečeno, je to něco jako Javascript bez typových konverzí. Místo sloľenými závorkami se bloky označují indentací. Řádky začínající stejným počtem mezer patří k sobě, řádky s větąím mnoľství mezer značí vnořený blok, řádek začínající menąím mnoľstvím mezer neľli řádek předchozí, značí konec alespoň jednoho bloku. Kolik bloků právě skončilo, se pozná podle toho, kterému bloku nad námi odpovídá náą počet mezer. Jinak je to obvyklý programovací jazyk, tedy jsou v něm funkce, proměnné, řídicí struktury if a while a objekty (poněkud avantgardně implementované). Toto by mělo průměrnému programátorovi stačit.

Hlavní výhodou Raspberry Pi (a přístrojů z této famílie) je 40pinový jeľík připomínající konektor IDE, ke kterému tzv. kąandou připojujeme IDE-disky. Tento jeľík má náhodou stejné rozměry (a kąandu na něj tudíľ lze narazit), jde ale o 40pinové GPIO (kde některé piny mají zvláątní roli, jiné jsou obecné GPIO). Raspbian se od ostatních Linuxových distribucí liąí právě tím, ľe má hned v základní verzi zabudovánu podporu pro toto GPIO, které tak můľeme pouľívat. Například ve zmíněném Pythonu. To bychom to ovąem nebyli my, aby se v pravou chvíli neobjevilo Visual Studio. A ta chvíle právě přiąla:
Raspberry Pi je poměrně bohatá rodina přístrojů, do které patří několik modelů. Například Raspberry Pi Zero, 2 (potaľmo 2A), 2B, 3 (potaľmo 3A), 3B, 3B+ a 4. Ačkoliv jde o jednu rodinu, přístroje se liąí například hlavním procesorem. Pro některé procesory (konkrétně a alespoň ty osazované na Raspberry verzí 2 a 3) existuje operační systém jménem Windows 10 IoT Core. Dávejte pozor, protoľe například pro verzi 3B+ sice tento systém existuje, ale v experimentální verzi (která se uľ asi rok neupdatovala a její budoucí osud lze povaľovat za nejasný). V této experimentální verzi plno věcí nefunguje (například WiFi, kterou model 3B+ má). Jak je to s fungováním WiFi na verzi 3A (která nemá konektor RJ45, který spolu se čtveřicí USB-portů tvoří rozdíl mezi verzemi A a B), bude potřeba teprve zjistit. Jasné vąak je, ľe pro verze 3A a 3B+ je třeba instalovat různé verze Windows 10 IoT Core (verze z 3B+ na 3A nebootuje). Windows 10 IoT Core můľete nainstalovat na microSD kartu například instalátorem k tomuto účelu připraveným jménem Windows Assessment and Deployment Kit.
Windows 10 IoT Core mají s těmi Windows, které znáte, jen velmi
málo společného. Jde o systém úplně jiný (není tam ani Notepad,
ani Paintbrush, ani Minesweeper, ani Solitaire a ani ľádná jiná
z vlajkových lodí provázejících nás Windows od nepaměti). Systém je
navrľen pro přístroje bez displayů a klávesnic. Je tedy moľné jej
vzdáleně administrovat (na portu 8080 běľí webové rozhraní,
ke kterému se lze přihlásit a tak stroj spravovat) a je moľné
k němu otevřít ssh (na port 22, kde ovąem místo osvědčeného
UNIXového shellu máme vylevněný command.com). Klávesnice, myą
a monitor vąak je taktéľ podporován a má jisté výhody, kdyľ tyto
periferie připojíme. Sice si nezahrajeme Miny ani Patience (pokud si je sami
neimplementujeme), ale
dostaneme se do lokálního administračního rozhraní (se kterým je
trochu větąí legrace neľli s tím vzdáleným). A kde jsou Windows
(by» IoT Core), tam strká pracky Visual Studio.
Není tudíľ asi překvapivé, ľe i tyto přístroje (nainstalujeme-li
na ně Windows 10 IoT Core) můľeme programovat ve Visual Studiu.
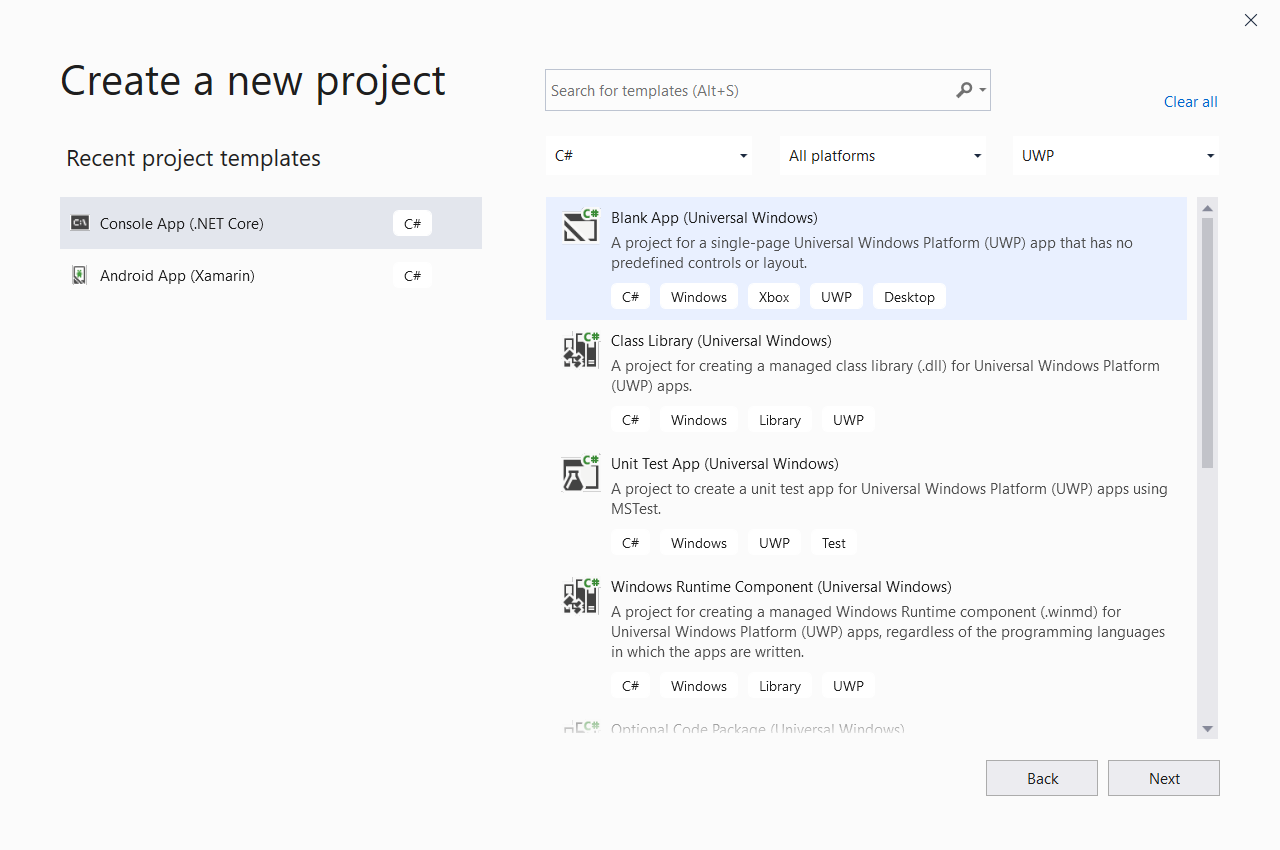
Tentokrát musíme v Installeru zakliknout podporu Universal Windows
Applications. Pak budeme schopni vytvářet aplikace běľící jak
u nás, tak na Raspberry. Visual Studio je pořád stejné, C# také, jen
vstup a výstup je zase jiný (a ukáľeme si jej na příkladu). Tentokrát
ted vytvoříme Blank App (Universal Windows).
Podobně jako kdyľ jsme vyvíjeli aplikace pro Android, můľeme ve Visual Studiu aplikaci uploadovat do Raspberry a dokonce tam vzdáleně ladit. A v případě, ľe bychom s tím měli problémy, můľeme zkusit ladit lokálně (proč jinak by se dotyčná platforma jmenovala Universal Windows Application). Ladění nám lokálně půjde do chvíle, kdy si začneme hrát s GPIO (to obvykle lokálně přítomné nemáme).
Nyní se tedy opět pustíme do příkladů. Začneme tím, ľe i nově vytvořenou aplikaci lze spustit. Toto je vhodné si vyzkouąet, abyste zjistili, co vám případně brání v úspěąném spuątění aplikace. Vytvořte tedy novou aplikaci a spus»te ji na vzdáleném zařízení.
Vytvořit aplikaci nebude těľké. Spustit ji bude obtíľnějąí. Přesněji
obtíľnějąí to bude, chcete-li ladit na vzdáleném hardwaru. Ne nadarmo
se typ aplikace jmenuje Universal Windows Application, ladit ji tedy
můľete i lokálně. Chcete-li vąak ladit jinde, je třeba toto nastavit.
Konkrétně chceme-li ladit na Raspberry Pi, které má jako CPU některý
z famílie ARMů, je třeba ve Visual Studiu přenastavit obsah
v liątě popisující spouątění a ladění (sestávající ze tří okének
obvykle obsahujících stringy Debug, x86 a Device.
Spouątět sice stále můľete ladicí verzi (tedy slovo Debug můľete
ponechat). Místo x86 uľ ale nastavíte ARM,
protoľe Raspberry Pi nemá CPU intelské famílie ale ARM, jak jsme
si jiľ řekli a namísto Device nastavíte
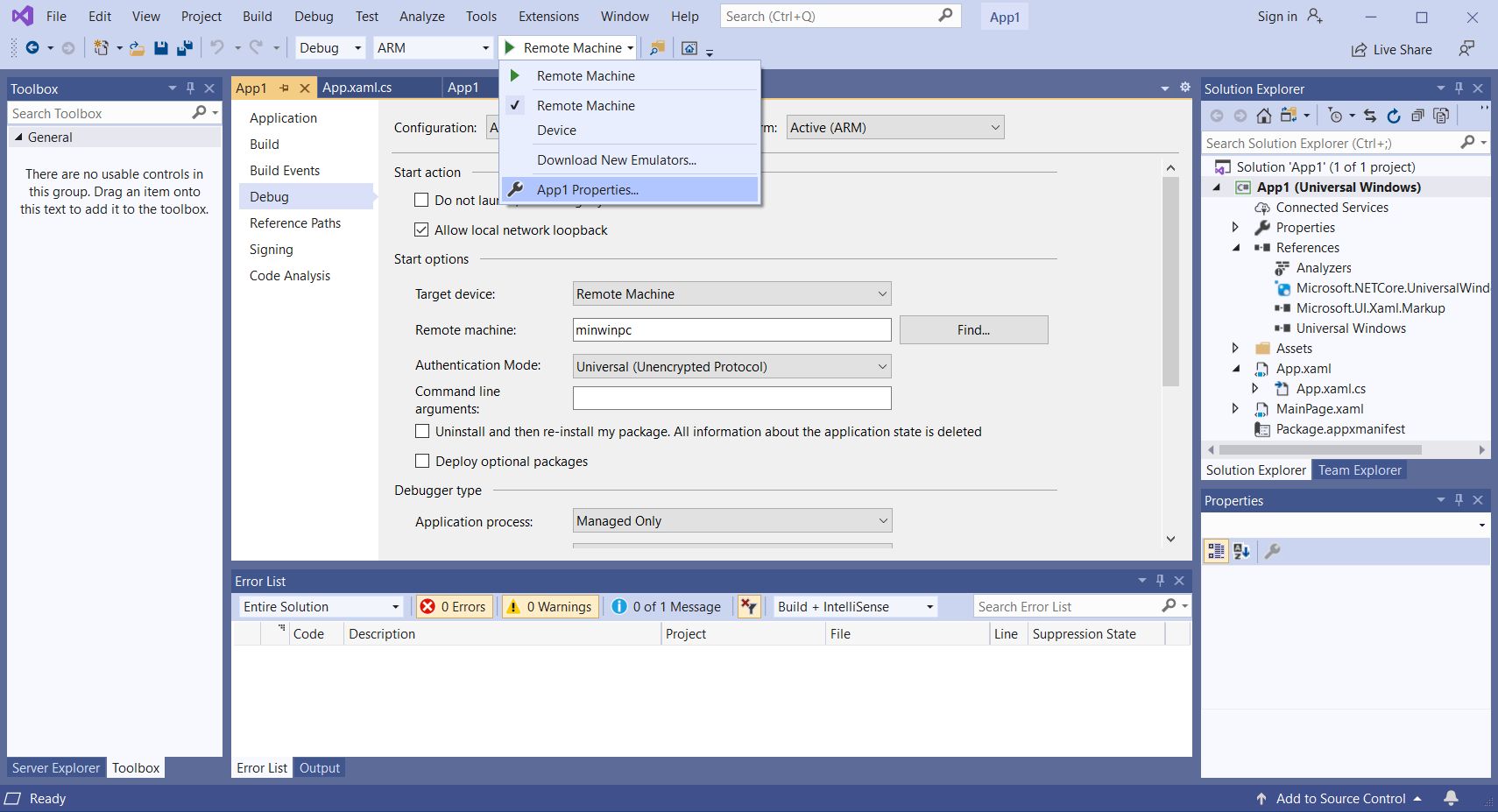
Remote Machine. Nastavení je pak zapotřebí dokončit
v Project -> Properties.
Tam v tabu Debug musíme nastavit jméno nebo IP adresu
dotyčného přístroje do poloľky Remote Machine. Dále
je třeba v nastavení zapnout Developer mode. O ten
se nemusíme aľ tolik starat. Jen si necháme vytvořit Universal
Windows Application, Visual Studio se nás rovnou při kaľdém startu
(dokud to tak nenastavíme) bude vyptávat, v jakém (vývojářském)
reľimu má být. Tam tedy naklikáme Developer mode.
Ostatní nastavení (projektu) nehraje aľ takovou roli. Některé tutoriály radí
změnit i Authentication Mode na None, případně
do Remote machine za adresu (či jméno) přidat dvojtečku
a číslo portu (8116). Někteří zase říkají, ľe bez spuątění remote debuggeru
na dotyčném zařízení (ve webovém interfacu od Raspberry v sekci
Debug) zapnout (tlačítkem vpravo dole) debugger.
Autorovi textu se jako jediná důleľité věc rozhodující
o úspěchu či neúspěchu uploadu a následného spuątění jeví připojení
k Internetu. S připojením funguje jakékoliv nastavení zmíněných poloľek,
bez připojení pak nefunguje nic. Toto je poněkud zvláątní, protoľe
přístroje provozující Windows 10 IoT Core tak musejí být při kaľdém
nahrávání programů připojené k Internetu. To vypadá jako významné
bezpečnostní riziko. Po uploadu (přesněji po ukončení ladění) vąak jiľ lze spojení odpojit.
Máme-li prázdnou aplikaci spuątěnu, vidíme, ľe aplikace pro Universal Windows Platform vypadají poněkud jinak neľli ostatní aplikace. S tím souvisí také to, co jsme jiľ viděli na Androidu, a to velmi opatrná práce s vybavením. Konkrétně a například proces opět ani nesmí hledat data na filesystemu (potaľmo na microSD-kartě). Svůj majetek musí mít aplikace přibalený u sebe. Chceme-li tedy pracovat se souborem, musíme říci, ľe aplikace bude přistupovat do filesystemu. Nechceme-li toto nastavovat, musíme vyuľít resourcy, tedy potřebné soubory, se kterými budeme pracovat, přibalit do projektu. Toto uděláme hned ve druhém příkladu (kde nám bude aplikace vyhrávat). Příklady vąak teprve začnou a je třeba postupovat od začátku (hrát si teprve budeme).
Máme-li naklikaný prázdný projekt (který jsme před chvíli úspěąně
spustili), zdrojový kód, který budeme modifikovat, najdeme v souboru
MainPage.xaml.cs. Ten najdeme v Project Manageru pod
souborem MainPage.xaml. Chceme-li formulář a designera,
otevřeme MainPage.xaml. V designeru se kliká způsobem,
který znáte z Windows Forms Applications. Časem se vąimněte, ľe prvky
na formuláři se také chovají způsobem, na který jsme zvyklí. Tedy
textový obsah se skrývá pod wrapperem Text, tlačítko
je stále instance třídy Button,... Taktéľ si ale vąímejte,
ľe některé prvky jsou jiné!
Příklad 1: V designeru naklikejte na formulář tlačítko,
tedy prvek typu Button a místo pro zobrazování textu
typu TextBlock (který tu zastupuje prvek Label,
který znáte z Windows Forms Applications. Tlačítko pojmenujte
cudlik, textové políčko pojmenujte natext a nechte
tlačítku vygenerovat ovladač události (ten s defaultním jménem
cudlik_Click). Tento ovladač nastavte takto:
private void cudlik_Click(object sender, RoutedEventArgs e)
{
natext.Text = "Buch!";
}
Příklad spus»te a obdivujte, jak stále vąechno funguje stejně, jako
jste zvyklí z Windows Forms Applications (jen ty prvky se jmenují
občas jinak).
Příklad 2: Jako Asset přidejte soubor jménem
Brahms.mp3, příklad laďte na stroji se sluchátky nebo
reproduktorem. Povąimněte si, ľe Raspberry Pi má port na sluchátka.
Tím se na vás případně bude linout zvuk. Zvuk přes HDMI ve Windows 10
IoT Core na Raspberry Pi není podporován aspoň zatím). Týľ ovladač události jako
v minulém příkladu nyní definujte takto:
private async void cudlik_Click(object sender, RoutedEventArgs e)
{
StorageFolder Folder = Windows.ApplicationModel.Package.Current.InstalledLocation;
Folder = await Folder.GetFolderAsync("Assets");
StorageFile sf = await Folder.GetFileAsync("Brahms.mp3");
MediaElement PlayMusic = new MediaElement();
PlayMusic.SetSource(await sf.OpenAsync(FileAccessMode.Read), sf.ContentType);
PlayMusic.Play();
}
Tentokrát (provádíme-li pokus na Raspberry Pi nebo počítači bez reproduktorů)
je třeba připojit sluchátka. Vąimněte si, kolik práce dá přehrát uloľený zvuk. V příkladu vidíte přístup k vlastním Assetům (prvních 5 řádků). Následuje spuątění vyhrávání (volání metody
Play). Taktéľ si vąimněte klíčových slov async a await. První klíčové slovo pouľíváme jako modifikátor funkce, která pouľije to druhé klíčové slovo. To druhé klíčové slovo znamená, ľe se má volání provést asynchronně, tedy nemá se čekat na jeho výsledek. Jeątě přesněji klíčové slovo async v definici funkce říká, ľe se nemá čekat na výsledek naąeho volání, jelikoľ si spustíme asynchronní funkci.
Příklad 3: Formulář s tlačítkem a textovým prvkem se nám osvědčil, tak ho vyuľijeme i nyní. Opět jen modifikujeme ovladač kliknutí na tlačítko:
private void cudlik_Click(object sender, RoutedEventArgs e)
{
MediaElement mediaElement = new MediaElement();
var synth = new SpeechSynthesizer();
//var voices = SpeechSynthesizer.AllVoices;
//synth.Voice = voices.First(x => x.Gender == VoiceGender.Female);
Windows.Media.SpeechSynthesis.SpeechSynthesisStream stream = await synth.SynthesizeTextToStreamAsync("Good-bye world!");
mediaElement.SetSource(stream, stream.ContentType);
mediaElement.Play();
}
Vidíme, ľe zvukový výstup je pomalu jednoduąąí, neľli přístup k vlastním souborům. Zakomentované řádky je moľné odkomentovat, tím se nastavují vlastnosti hlasu loučícího se se světem.
Příklad 4: Ke GPIO 2 (tedy 3. pinu) připojíme výstup senzoru přiblíľení (magnetického čidla, které hlásí, zda je poblíľe něj magnet, podrobnosti jsou v následující sekci u Arduina). Prvek TextBlock se nám nyní výrazně hodí:
using Windows.Devices.Gpio;
...
namespace priklad{
public sealed partial class MainPage:Page
{ GpioController gpio = GpioController.GetDefault();
GpioPin MyPin;
public MainPage()
{ this.InitializeComponent();
MyPin=gpio.OpenPIN(2);
try
{
MyPin.SetDriveMode(GpioPinDriveMode.Input);
MyPin.SetDriveMode(GpioPinDriveMode.InputPullUp);
}
catch (Exception)
{
MyPin.SetDriveMode(GpioPinDriveMode.Input);
}
MyPin.DebounceTimeout = TimeSpan.FromSeconds(0.5);
MyPin.ValueChanged += MyValueChanged;
MyValueChanged(MyPin, null);
}
private void write(string what,bool alm)
{ IAsyncAction task = Dispatcher.RunAsync(Windows.UI.Core.CoreDispatcherPriority.Normal, () =>
{ natext.Text = what;
natext.Foreground = new Windows.UI.Xaml.Media.SolidColorBrush(alm?Windows.UI.Colors.Red:Windows.UI.Colors.White);
});
}
public void MyValueChanged(GpioPin sender, GpioPinValueChangedEventArgs e)
{ if (sender.Read() == GpioPinValue.High)
write("Prichazi proud!",true);
else
write("Jsme na suchu!",false);
}
}
}
Nechali-li jsme si na formuláři tlačítko s nastaveným ovladačem kliknutí, musíme samozřejmě tento ovladač nechat definovaný (ale to je snad jasné).
Na tomto příkladu si vąimněte práce s GPIO. Jeden pin reprezentuje objekt
třídy GpioPin. Tento pin musíme otevřít (coľ děláme v konstruktoru
třídy MainPage). Musíme říct, do jakého reľimu se má nastavit. My se jej pokouąíme nastavit do reľimu, kdy jako nepřipojený bude hlásit, ľe jím proud teče. Pokud tento reľim nevyjde (přijde výjimka), řekneme jen, ľe je to pin vstupní. Při startu si tedy pin zinicializujeme a nastavíme mu ovladač změny (funkce MyValueChanged). Změní-li se napětí na dotyčném pinu, objeví se údaj o tom v textovém prvku. Aby se údaj o tom, v jakém stavu pin je, objevil hned na začátku (a nemuselo se čekat na změnu), dotyčný ovladač rovnou explicitně zavoláme.
Ovladač události vyvolá pozaďové vlákno. Pro to platí tatáľ omezení, jako jsme viděli dříve (například na Androidu). Tedy toto vlákno nesmí zapisovat do formuláře. My vąak právě do formuláře zapsat potřebujeme. Proto to neděláme přímo, ale voláme si na to funkci write, která tuto změnu provede asynchronně. Samozřejmě bychom tuto změnu mohli asynchronně nechat provést rovnou v ovladači události, ale kód by začal být lehce nepřehledný (dělali bychom tam dvakrát totéľ).
Cvičení: Ke kafomatu vyrobte juke-box. Pokud jiľ juke-boxy nepamatujete, jde o přístroj, do kterého se hodila mince a za tuto minci si člověk mohl nechat zahrát vybranou skladbu. Juke-boxy kdysi obsahovaly gramofon a mnoľství desek, z nichľ si platící mohl vybrat. Dnes takovýto přístroj implementujte s vyuľitím Raspberry Pi. Juke-box pak můľete postavit vedle kafomatu. Zatímco kafomat ničí naąe ľaludky, Juke-box bude ničit naąe uąi. A oba to dělají za (naąe) peníze. :-)
Jak vidíte, Universal Windows Platform se chová do jisté míry specificky, ale C# je pořád stejný, Visual Studio je pořád stejné a řada různých temných omezení je stále stejná. Tomu jsme celou dobu říkali principy a pokouąeli jsme se na ně soustředit. To ostatní, co se v různých jazycích liąí, označujeme jako anomalie a na ty začne být čas soustředit se buďto na pokročilých kurzech, anebo samostatně po studiu, aľ zjistíte, ve kterém prostředí zkusíte strávit zbytek ľivota. Na anomaliích je nepříjemné, ľe si na ně člověk zvykne a v ostatních jazycích mu chybějí. Proto jsme se dosud pokouąeli soustředit na principy.
Arduino je poměrně levné prostředí osazené zpravidla nějakým microcontrolerem, které bylo původně navrľeno k výukovým účelům. Proto existuje mnoho výukových sad (za drahé peníze). Jelikoľ jsem názoru, ľe pro práci s elektřinou jsou potřeba zkouąky dle zmíněné vyhláąky 50/1978 Sb., není mi úplně jasné, jak mají výrobci těchto sad oąetřenu odpovědnost za ąkody vzniklé nekompetením pouľitím těchto výukových sad. Výhodou Arduina je, ľe má poměrně sluąnou podporu a také technické vybavení čítající několik digitálních i analogových vstupů (GPIO), 5V napájení, 3.3V napájení a několik zemnicích pinů. Přístroj se napájí také pomocí nějakého USB konektoru a tímto konektorem se téľ dá programovat (přesněji tudy se do něj dá nahrát program). Taktéľ je Arduino poměrně stabilní. Nevýhodou je vąak cena. Jelikoľ jde o dominantní nástroj slouľící ve výuce, o Arduina na trhu se přetahujeme s mnoľstvím ľáků. Existují vąak i daląí přístroje, které dovedou udělat podobnou práci (nechceme-li vyuľívat vąechny schopnosti Arduina). Výhodou jiných přístrojů je, ľe je lze programovat týmľ studiem jako Arduino (jen je potřeba postahovat jiné knihovny) a některé vývojové destičky mají oproti Arduinu zabudované prvky pro sí»ovou komunikaci (na coľ Arduino potřebuje shield). Takovou destičkou je například NodeMCU od Wemos. NodeMCU je destička, na které větąinu místa zabírá ESP8266, coľ je mikrokontrolér s připojenou WiFi (a několika piny včetně pinu napájecího, zemnicího, jednoho analogového GPIO a také několika digitálních GPIO pinů).
Arduino a destičky z jeho famílie se programují pomocí Arduino
Studia. Toto studio je výpočetně výrazně méně náročné, neľli
vąechna dosud předvedená studia. Správa projektů je tu poněkud
jednoduąąí. Projekt je reprezentován adresářem a jemu
přísluąející zdrojáky jsou vąechny v něm obsaľené soubory
s koncovkou ino. Daląí výhodou je, ľe Arduino Studio
pouľívá jako překladač g++-avr, tedy GNU C++ pro AVR. Tento
překladač tedy implementuje podmnoľinu C++, které znáte.
Konkrétně fungují funkce, proměnné, základní řídicí struktury,
objekty, konstruktory, destruktory a přetěľování funkcí. Naopak
nefungují například výjimky nebo ąablony. A knihovní funkce,
na které jste byli zvyklí, také nefungují. Nicméně jsou nahrazené
jinými funkcemi. Ostatně řada z těch funkcí, které znáte, nyní
nemá dobrý smysl. Těľko vyuľijete například funkci printf
na stroji bez displaye. Základní komunikace (pro účely ladění)
probíhá po USB. Co vám destička hlásí, můľete sledovat Serial Monitorem (který vypisuje jednotlivé znaky po seriovém portu přicházející) nebo Serial Plotterem
(který vykresluje přicházející hodnoty). Oba jsou k dispozici
v menu Arduino Studia (konkrétně v menu Tools). Seriový
port nás provází
odjakľiva a jistě jste se o něm učili (duplexní asynchronní přenos,
jedním drátem se vysílá, druhým přijímá).
Komunikace po seriovém portu můľe probíhat různými
rychlostmi. Dnes rozumně pouľívaná rychlost je 115 200 bps (není to
mnoho, ale větąina přístrojů ji zvládá a pro účely ladění
i běľného přenosu dat z levných měřicích přístrojů bezpečně
postačuje).
Tools intuitivně pojmenovanou poloľkou
Port.
Program vytvořený v tomto studiu, jak vidíte, nemá funkci main, ale je osazen dvěma (jinými) funkcemi, a to setup a loop. První funkce se spustí po startu destičky (a vykoná se jednou od začátku do konce). Jen doběhne, spustí se funkce loop,
která se, pokud někdy doběhne, ihned spustí znovu od začátku.
Programování těchto přístrojů tedy vypadá úplně jinak neľli
programování aplikací pro mobilní telefony. Zatímco tam jsme měli
událostmi řízené programování, tady jsou události jen dvě (start
systému, který spustí funkci setup a dokončení běhu nějaké funkce, coľ spustí funkci loop).
Jsme tedy zpět u toho programování, ke kterému vás vedli v prvním
ročníku: Obstarejte si údaje, spočítejte, co chcete a vypiąte
výsledek. A znovu.
Tyto přístroje například lze pouľít jako jednoduchý zabezpečovací systém, který hlídá, zda se na nějakém území neděje něco podezřelého - například jestli tam nikdo neprochází či jestli někdo neotevřel okno či dveře, které má systém pod dozorem. Tento zabezpečovací systém pak můľe poslat seriovým portem údaje do počítače (který je vyhodnotí a například zavolá majiteli, ľe má ąkodnou v revíru - nebo dokonce destička sama můľe nařídit siréně, a» se rozkvílí a lupiče svým kvilem vypudí). Anebo můľe údaje poslat pomocí WiFi (zavolat si na server). Poněkud příjemnějąí pouľití můľeme vidět například na stroji DarwiKuk. Tento přístroj navrhl kolega Rubeą, člen spolku Darwiniana k usnadnění pěstování dravých rostlin. Masoľravé rostliny jsou mezi těmi běľně doma pěstovanými nadprůměrně náročné. Jelikoľ řadě lidí hynou, kolega Rubeą navrhl a implementoval přístroj, který sleduje vybrané meteorologické jevy. DarwiKuk bude jedním z naąich příkladů, k čemu lze Arduino Studio pouľít. Nicméně my jsme zatím s programováním na začátku a zajímá nás, jak to celé funguje.
K programování těchto zařízení existuje mnoho tutorialů
(různých kvalit), kde obvykle zanikají principy. O těch si nyní
zkusíme chvíli povídat. Vyuľijeme toho, ľe jazyk samotný (tedy
omezenou verzi C++) jiľ znáte a můľeme se zcela soustředit na vstup
a výstup. Ten je reprezentován předevąím analogovým
a digitálním vstupem a výstupem. Abychom mohli provozovat
tento vstup
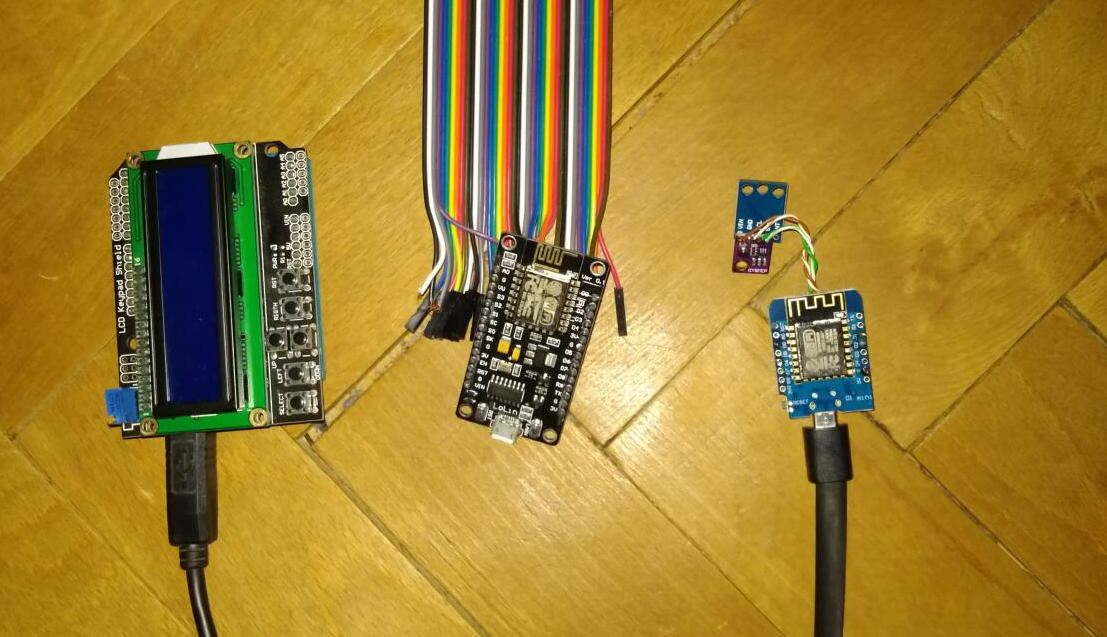
a výstup, potřebujeme nějaký pin. My vyuľijeme destičku WeMos D1
Mini (coľ je, jak vidíme, ESP8266, tedy počítač velikosti pecky
vybavený WiFi anténou, připájený na destičku, která má trochu
zvětąit piny - a také na cestu strká různé představné odpory).
Programujeme-li konkrétně tuto destičku, musíme pro ni instalovat
podporu ESP8266 tak, ľe v menu File vybereme poloľku
Preferences a v tabu Settings vyplníme
do poloľky Additional Boards Manager URLs: adresu
http://arduino.esp8266.com/stable/package_esp8266com_index.json
Dále musíme nastavit, ľe kompilujeme pro tuto destičku. Tedy v menu
Tools vybereme poloľku Board a v podmenu
vybereme poloľku Boards manager... Tam (pomocí okénka vpravo nahoře)
necháme najít ESP8266, klikneme Install
a chvíli počkáme, aľ se stáhnou přísluąné knihovny.
No a nyní uľ se můľeme pustit do toho.
Připomeňme si, ľe chceme manipulovat se vstupem a výstupem, a to analogovým a digitálním. Abychom si demonstrovali digitální výstup, pouľijeme pin 2, který má tu výhodu, ľe je připojený k LED, která umí krásně modře svítit. ®e jsme úspěąně zapsali, tedy poznáme podle toho, ľe se tato dioda rozsvítí nebo naopak zhasne. Necháme ji tedy pro své pobavení blikat ve vteřinových intervalech.
Příklad 1: Blikání diodou
#define LED_PIN 2 // GPIO02 neboli D4 pripojene k LED
void setup() {
// put your setup code here, to run once:
pinMode(LED_PIN,OUTPUT);//Zinicializujeme jako vystupni
}
void loop() {
// put your main code here, to run repeatedly:
digitalWrite(LED_PIN,LOW);//rozsvit
delay(1000);
digitalWrite(LED_PIN,HIGH);//zhasni
delay(1000);
}
V tomto příkladu ve funkci setup inicializujeme GPIO 2
na destičce označený jako D4 jako výstupní (tím říkáme, ľe na něj budeme
zapisovat). Ve funkci loop to pak také děláme. Tato funkce
rozsvítí LED, vteřinu počká, zhasne a opět vteřinu počká. Kdyľ tato funkce
skončí, spustí se ihned znovu. Proto nám dioda bliká.
Příklad 2: Načítání digitálního vstupu
Chceme-li načítat, potřebujeme něco, co nám data poąle.
Například senzor otevření dveří. To je ve skutečnosti magnetický
senzor, který zjią»uje, zda je k němu přiblíľen magnet. Senzor
je přilepený na futro u dveří, magnet je přilepený u něj
na dveřích, otevřou-li se tyto, magnet se vzdálí. Úplně stejně bychom
z technického hlediska pracovali například s PIR-senzorem (jen by se
nejspíąe liąilo napájení, PIR-senzor obvykle potřebuje 5V
napájení, senzor otevírání dveří naopak jen 3V). Ovąem oba
senzory jen odpovídají na otázku: "Vidíą něco zajímavého?"
#define vstup D1
void setup()
{ Serial.begin(115200);
pinMode(D1,INPUT_PULLUP);//je-li pin odpojený, má hlásit HIGH
//pinMode(D1,INPUT);//alternativa, kdy pri odpojeni nevime, co se stane
}
void loop()
{ Serial.println(digitalRead(D1));
delay(100);// opet delame 10 mereni za sekundu
}
Tentokrát si můľeme výstup nechat zobrazit pomocí Serial plotteru (anebo Serial monitoru).
Příklad 3: Načítání analogového vstupu
Analogový vstup si můľeme demonstrovat například na čidle zalití
či deątě (také bychom podobně mohli vyuľít odporový teploměr,
tedy čidlo, kterému se s teplotou mění odpor, ovąem tyto analogové
teploměry nebývají moc kvalitní). Měřák zalití (který také
kvalitou zrovna neoplývá, ale aspoň je levný) funguje buďto také
odporově (kdy k jedné elektrodě připojíme napětí a na druhé
koukáme, jaké napětí na ni dorazí skrz zpravidla ąpinavou a tedy
sluąně vodivou vodu), nebo kapacitně (zkusí si nabít okolí a podle
toho, jakou kapacitu okolí má, usoudí, kolik vody v okolí je).
Kaľdopádně tedy má smysl uvaľovat o tom, ľe toto čidlo nebude
digitální, ale analogové.
#define VSTUP A0 //jediny analogovy vstup
void setup()
{ Serial.begin(115200);
}
void loop()
{ Serial.println(analogRead(VSTUP));//precteme a vypiseme po seriaku
delay(100);// po mereni pockame 100 ms
}
Výstup je vhodné si zobrazit Serial plotterem.
Analogový výstup bychom mohli vyuľít například k roztáčení motoru (kdybychom chtěli přibliľně řídit rychlost dotyčného motoru, jinak pro pohon motoru postačí digitální výstup, ale nejspíąe budeme potřebovat relé nebo transistor, protoľe motor má příkon, který pomocí GPIO proti zemi nejsme schopni pokrýt). Řeąení si jistě dovedete představit podle výąe uvedených tří příkladů. My postoupíme dál, a to k vyuľití advancovanějąích měřáků. Jako příklad nám poslouľí
Příklad 4: Darwikuk.
Zdrojové texty
jsou na webu (a jsou dílem kolegovým, tak je sem nebudu kopírovat).
Vąimněte si, ľe tam připojujeme měřáky zjią»ující teplotu,
tlak, vlhkost a osvětlení. K tomu účelu jsme připojili dvě
destičky celkem čtyřmi dráty (a jeątě k tomu jsme ty destičky
připojili k sobě). Jak tedy celý tento systém funguje?
Začneme menąí kontrolní otázkou. Nalistujte ve zdrojovém kódu funkci
hodnotaMereni a důkladně si rozmyslete, co dělá. Velmi
výrazně se vám k tomu mohou hodit třídicí algoritmy probírané
v prvním ročníku. Vąimněte
si téľ, ľe kolegovy zdrojové texty jsou napsané velmi kultivovaně a také
jsou dobře okomentované.
Myąlenkově nejnáročnějąí část softwaru jsme jiľ proąli (v minulém odstavci) a přejdeme k hardwaru. Zúčastněné senzory (BME280 a TSL2561) nejsou ani analogové měřáky a ani měřáky digitální (v tom smyslu, jak jsme si řekli). Ve skutečnosti jsou to digitální přístroje podporující komunikaci pomocí I2C (o čemľ jste se učili v Principech počítačů). I2C jste probírali jako sběrnici (protoľe se dá řetězit). Název je zkratka Inter Integrate Communication, coľ odkazuje k tomu, ľe jde o protokol pro komunikaci mezi integrovanými obvody (tedy mezi přístroji majícími základní inteligenci). I2C je protokol typu otrokář - otrok a funguje se čtyřmi vodiči. Otrokář poskytuje napájení a zem (k čemuľ potřebuje dva vodiče) a bubnuje (po třetím vodiči). Bubnuje-li otrokář levou rukou, po čtvrtém (datovém) vodiči můľe poslat bit svého poľadavku. Bubnuje-li otrokář pravou rukou, můľe otrok poslat bit odpovědi. Je asi jasné, ľe "bubnování" je realizováno napětím (potaľmo jeho absencí) ve vodiči (tedy jednou rukou bubnujeme, pokud je vodič pod napětím, druhou pokud je vodič uzemněný). Po datovém vodiči tedy formálně probíhá synchronní seriová komunikace.
Nyní je jasné, proč stačí čtyři vodiče, ačkoliv přenáąíme analogové informace (a jeątě ke vąemu hned čtyř druhů). Otázkou jeątě je, jak to, ľe přístroj funguje, kdyľ jsou k těm čtyřem vodičům připojené dvě destičky současně. I na to přináąí odpověď specifikace I2C. Kaľdý otrok totiľ má adresu. Otrokář v rámci requestu řekne adresu otroka, se kterým se baví, a tento otrok také začne odpovídat. Jelikoľ BME280 má jinou adresu (a celkově jiné detaily protokolu pro komunikaci) neľli TSL2561, tyto dvě destičky si nepřekáľejí. Ale kdybychom zkusili dvakrát připojit stejnou destičku, byl by váľný problém.
Toto je uľitečné věděti, abychom chápali, jak svět kolem nás funguje (a nepřipadali si jak v pohádce, kdyľ naąe ľivoty ve skutečnosti řídí mocné vědy přírodní). Pro samotné vyuľití to vąak není nutné. Samotná komunikace (jak vás mohlo napadnout) probíhá tak, ľe voláme funkce z nějaké knihovny. V tomto případě jde o funkce z knihoven od společnosti Adafruit, které jsou navrľené právě na komunikaci s těmito destičkami. My si tedy jen řekneme "dej sem teplotu" a přísluąná funkce nám ji přes I2C vybubnuje.
Cvičení: Navrhněte kafomat. Začněte třídičkou mincí,
která bude IR-čidlem sledujícím přiblíľení určovat, kterou
dírou vhozená mince propadla (a přísluąnou hodnotu započítá).
Pokračujte tím, ľe motor bude vhodnou dobu prskat (horkou) vodu,
dokud jí neproteče dostatek. Jak byste řeąili dávkování práąku?
Přeci stejně jako padání kelímků. A pokud se vám nepodaří nic
z předeąlého, navrhněte pro kafomat alespoň teploměr, který bude
zjią»ovat, jakou teplotu má vyráběné kafe. Anebo moľná
raději navrhněte teploměr, který bude měřit teplotu kupujících.
Bude-li mít zákazník teplotu přes 37,5 stupně, je podezřelý,
ľe má dnes velmi populární SARS verze 2.0 (který nám zruąil
výuku) a je třeba jej upozornit, ľe nedodrľuje karanténu
(a» si připraví tři míče na pokutu).
Nápověda: Na měření teploty zákazníka můľete zkusit
pouľít nějaký infračervený (a tedy bezkontaktní) teploměr. Teploměr,
na který by bylo potřeba sahat, u kafomatu být nemůľe, protoľe by
jeątě infekci ąířil! Taktéľ
nezapomeňte, ľe samotný kafomat musí připomínat pevnost. Jinak si k němu
budou pobudové chodit jako k bankomatu.


Cvičení: Navrhněte a implementujte robotický vysavač, přesněji robota uklízeče. Takového, který dokáľe uklidit nepořádek, co kaľdou chvíli nadělá váą kafomat z minulé úlohy. Z toho se poměrně nepochybně bude sypat černý intenzívně barvící práąek, suąené mléko a umělé sladidlo. Aby toho nebylo málo, kaľdou chvíli z něj také jistě vyąplíchne voda - v lepąím případě čistá, obvykleji vąak s rozpuątěným práąkem černé barvy.
Tímto končí naąe exkurze do světa internetových a mobilních aplikací. Vidíte, ľe jde o svět v poslední době se prudce rozvíjející. A být součástí takového světa bývá velkou výhodou.
Děkuji za pozornost, dál uľ musíte sami. Mnoho úspěchů.